在之前的文章中,我们已经讲解了YOLOv3的原理。这篇,我们来折腾一下YOLOv3的训练实操。此篇中,我们不打算动手写YOLOv3的算法编程实现,而是直接使用官方代码进行编译,这样我们的折腾点都在数据集配置,调参等方面。
首先进入YOLO的官网https://pjreddie.com/darknet/yolo/ 。
YOLO从v1到v3都是支持的,但是默认是最新的v3。如果需要去到老版本,可以键入
https://pjreddie.com/darknet/yolov1/
或者
https://pjreddie.com/darknet/yolov2
官网已经有比较详细操作过程,我只抽取其中一部分进行闭坑式讲解。
代码下载
1 | $ git clone https://github.com/pjreddie/darknet |
我们实际下载的是darknet而非YOLOv3本。因为YOLOv3只是基于darknet这个backbone而构建的应用于目标检测的专用网络,而基于darknet构建的网络很多,YOLOv3只是其中之一。比如RNN和darknet的结合可以进入:
https://pjreddie.com/darknet/rnns-in-darknet/
它实际上也是要下载darknet。
代码编译
1 | $ cd darknet |
这样就完成了编译,获得名为darknet的binary。
然而默认编译出来的binary是跑在CPU上的(也就是说不能通过GPU和CUDA来并行计算),且不支持OpenCV(也就是说不具备摄像头读图等功能)
想要获取以上两种功能(特别是能让你训练极度加速的GPU),你需要先改动Makefile再进行make:1
2
3
4
5
6
7$ vim Makefile
# 改动内容为:
GPU=1
...
OPENCV=1
...
$ make
GPU=1意味着使用Nvidia的卡及其CUDA。所以必须保证你的系统有卡,且安装了CUDA。CUDA的下载安装过程这里不赘述
OPENCV=1也需要你的系统安装了OpenCV库,,它不需要额外的硬件支持
当然,强烈建议使用GPU进行训练,它能让你的训练速度成百倍地增长。事实上,没有GPU,进入CV领域是没有意义的,你几乎做不了任何事情,除非你愿意等CPU一个月的训练时间。
初次测试
为了验证我们编译好的binary可用,先拿YOLOv3提供方训练好的权重进行预测
首先下载训练好的权重文件:1
$ wget https://pjreddie.com/media/files/yolov3.weights
是的,光这个yolov3.weights权重文件就有237M大小。
接着,对自带的图片dog.jpg进行目标检测:1
2
3$ ./darknet detector test cfg/coco.data cfg/yolov3.cfg yolov3.weights data/dog.jpg
或者
$ ./darknet detect cfg/yolov3.cfg yolov3.weights data/dog.jpg
最终的检测结果会生成在predictions.jpg里,打开看看: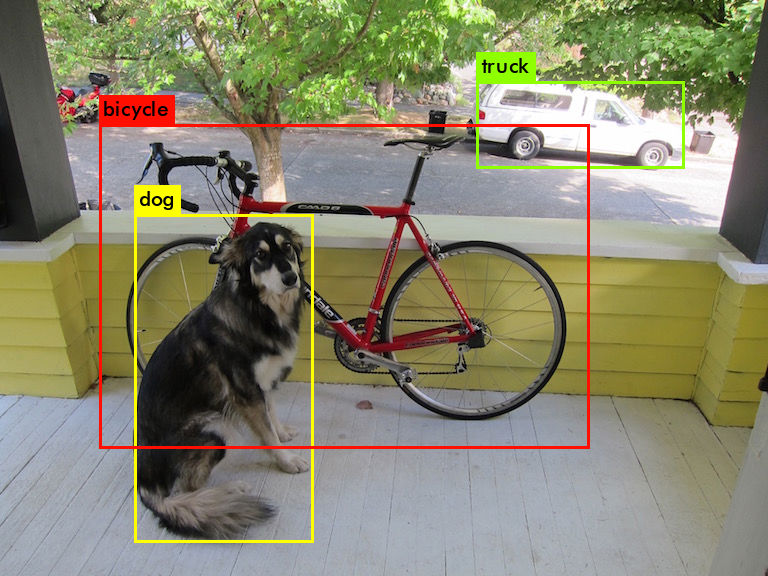
我们再回过头来看上面的命令。为什么两条命令中的参数 detector test cfg/coco.data 和 detect是一样的效果呢?
我猜测后者是前者的封装,于是前往源代码寻找答案:
打开examples/darknet.c1
2
3
4
5
6
7
8
9
10
11# examples/darknet.c:
430 } else if (0 == strcmp(argv[1], "detector")){
431 run_detector(argc, argv);
432 } else if (0 == strcmp(argv[1], "detect")){
433 float thresh = find_float_arg(argc, argv, "-thresh", .5);
434 char *filename = (argc > 4) ? argv[4]: 0;
435 char *outfile = find_char_arg(argc, argv, "-out", 0);
436 int fullscreen = find_arg(argc, argv, "-fullscreen");
437 test_detector("cfg/coco.data", argv[2], argv[3], filename, thresh, .5, outfile, fullscreen);
438 }
可见:
当传入”detector”的时候会调用run_detector(argc, argv) ①
当传入”detect”的时候会调用test_detector(“cfg/coco.data”,*) ②
①和②是一个效果吗? 接下来寻找run_detector和test_detector的函数体:
打开examples/detector.c1
2
3
4
5
6
7
8
9
10
11
12
13# examples/detector.c:
562 void test_detector(char *datacfg, char *cfgfile, char *weightfile, char *filename, float thresh, float hier_thresh , char *outfile, int fullscreen)
563 {
564 list *options = read_data_cfg(datacfg);
565 char *name_list = option_find_str(options, "names", "data/names.list");
...
...
789 void run_detector(int argc, char **argv)
790 {
...
...
836 if(0==strcmp(argv[2], "test")) test_detector(datacfg, cfg, weights, filename, thresh, hier_thresh, outfile, fu llscreen);
到这里就发现,原来run_detector被传入”test”是会调用test_detector(“cfg/coco.data”,*)的,所以是的①和②是一个效果
接下来还有另一个问题:有了yolov3.weights为什么还需要cfg/coco.data和cfg/yolov3.cfg呢?
因为yolov3.weights只是包含了训练生成的参数,而不含有网络信息,类别名信息等,所以我们需要引入另外的文件。
事实上,在训练和测试都需要这两个文件。
1)cfg/coco.data代表的是coco数据集的信息,我们在训练的时候需要它提供的提供“图片们存放的位置”,“类别名字有哪些”等信息,在测试的时候虽然不需要图片存放信息但是需要它给出的“类别名字有哪些”的信息,即data/names.list
2)cfg/yolov3.cfg给出的是网络的结构,训练的超参数等信息。当然训练和测试都需要它。
VOC数据集的训练
数据集准备
首先下载VOC2007和VOC2012数据集。实际上VOC2012包含的是从2008年到2012年的数据1
2
3
4
5
6wget https://pjreddie.com/media/files/VOCtrainval_11-May-2012.tar
wget https://pjreddie.com/media/files/VOCtrainval_06-Nov-2007.tar
wget https://pjreddie.com/media/files/VOCtest_06-Nov-2007.tar
tar xf VOCtrainval_11-May-2012.tar
tar xf VOCtrainval_06-Nov-2007.tar
tar xf VOCtest_06-Nov-2007.tar
数据集被统一存放在VOCdevkit/目录了,我们进入其中的2012数据集去看看:
1 | $ cd VOCdevkit/VOC2012/ && ls |
SegmentationClass和SegmentationObject不会被用到,因为它们是做语义分割或者实例分割用的,而YOLO是做目标检测的。
ImageSets会被用到,它存放的是哪些训练数据,哪些是验证数据的信息。
我们最关心的还是Annotations到JPEGImages的映射。举例理解:Annotations里面存放的2012_004329.xml记录了JPEGImages
里2012_004329.jpg的目标框位置,分类类别等信息。这个映射其实就是label到数据的映射。
不过可惜的是,YOLO官方代码有它自己的规则,它不接受.xml格式的label信息,它要简单的.txt格式。好在,官方提供了.xml到.txt的转换脚本,运行以下即可1
$ python scripts/voc_label.py
脚本的输出包括两部分,一个是记录图片位置的.txt:1
2$ ls *txt
2007_test.txt 2007_train.txt 2007_val.txt 2012_train.txt 2012_val.txt train.all.txt train.txt
另一个就是.txt格式的label:1
2
3
4$ ls VOCdevkit/VOC2007/labels
000001.txt 000002.txt 000003.txt ...
$ ls VOCdevkit/VOC2012/labels
2008_000002.txt 2008_000003.txt ...
好,至此VOC的数据就准备好了。
开始训练
首先要修改cfg/voc.data文件,这样训练的时候才能知道你的要训练多少类别(classes),训练集存放在哪(train),验证集存放在哪(valid),类别名类别文件用哪一个(names),训练出来的中间文件和输出的权重文件存放在哪个目录(backup)1
2
3
4
5
6$ vim cfg/voc.data
1 classes= 20
2 train = /home/dzi/YOLOv3/darknet/train.txt
3 valid = /home/dzi/YOLOv3/darknet/2007_test.txt
4 names = data/voc.names
5 backup = backup
然后要调整超参数:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26$ vim cfg/yolov3-voc.cfg
[net]
2 # Testing
3 #batch=1
4 #subdivisions=1
5 # Training
6 batch=64
7 subdivisions=16
8 width=416
9 height=416
10 channels=3
11 momentum=0.9
12 decay=0.0005
13 angle=0
14 saturation = 1.5
15 exposure = 1.5
16 hue=.1
17
18 learning_rate=0.001
19 burn_in=1000
20 max_batches = 30000
21 policy=steps
22 steps=10000,20000
23 scales=.1,.1
...
...
其中比较常调整是这几组参数:
1)batch=64和subdivisions=16,分别表示每次迭代用64张图片,在计算机处理的时候,每次输送16张进去。这两个参数能大则大,跟你的内存和显存有关。
2)max_batches = 30000,learning_rate=0.001, steps=10000,20000, scales=.1,.1 初始学习率为0.001,在迭代到10000次时,学习率衰减为0.001*0.1,在迭代到20000次时,学习率继续衰减为0.001*0.1*0.2, 迭代到30000次停止训练。
调参策略这里就不讲了,因为太过玄学。
最后一个准备是下载用Imagenet预训练好darknet53模型。根据之前文章讲过的理论,我们知道,YOLO(以及其它目标检测网络)采用了迁移学习,也就说先用backbone网络(darknet53)在数据众多的比如Imagenet数据集上进行图片分类学习,获得强大的分类能力,然后再将网络结构接入目标检测网络部分(YOLO),继续在目标检测数据集(VOC)上进行训练。1
$ wget https://pjreddie.com/media/files/darknet53.conv.74
开始正式训练!
1 | $ ./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg darknet53.conv.74 |
训练成果
用GPU训练了一天以后
…
来看一下成果:1
2
3
4$ ls -tr backup/
yolov3-voc_100.weights yolov3-voc_400.weights yolov3-voc_700.weights yolov3-voc_10000.weights
yolov3-voc_200.weights yolov3-voc_500.weights yolov3-voc_800.weights yolov3-voc.backup
yolov3-voc_300.weights yolov3-voc_600.weights yolov3-voc_900.weights
分别在100,200,…,900,10000次迭代之后把权重保存了下来。我们来测试一下效果
试一下100次迭代后的模型:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16$ ./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_100.weights data/dog.jpg
...
chair: 65%
diningtable: 56%
person: 54%
boat: 51%
cow: 54%
motorbike: 56%
person: 54%
chair: 61%
cow: 63%
diningtable: 61%
person: 54%
bicycle: 52%
person: 53%
...
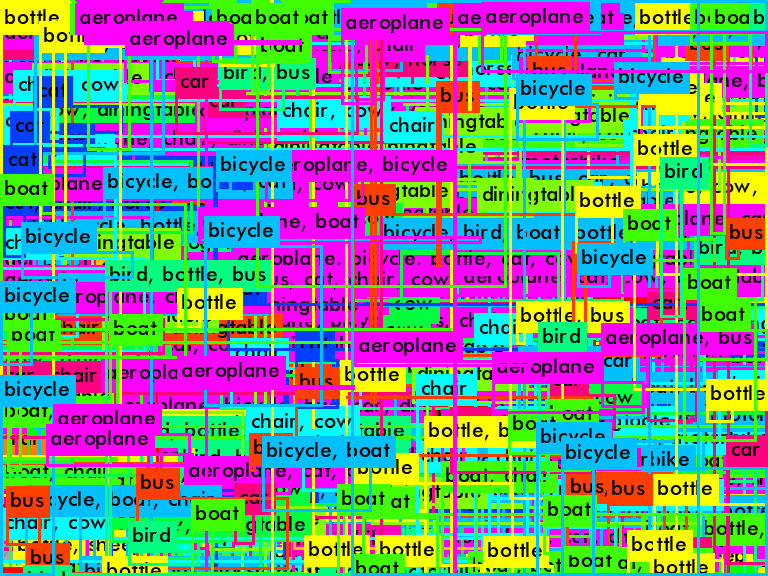
非常惨不忍睹!根据上面打印的置信度结果来看,的确整个模型的输出结果已经错乱了
试一下900次迭代后的模型:1
2
3$ ./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_900.weights data/dog.jpg
...
data/dog.jpg: Predicted in 0.181030 seconds.

什么变化都没有
再试一下10000次迭代后的模型:1
2
3
4
5
6
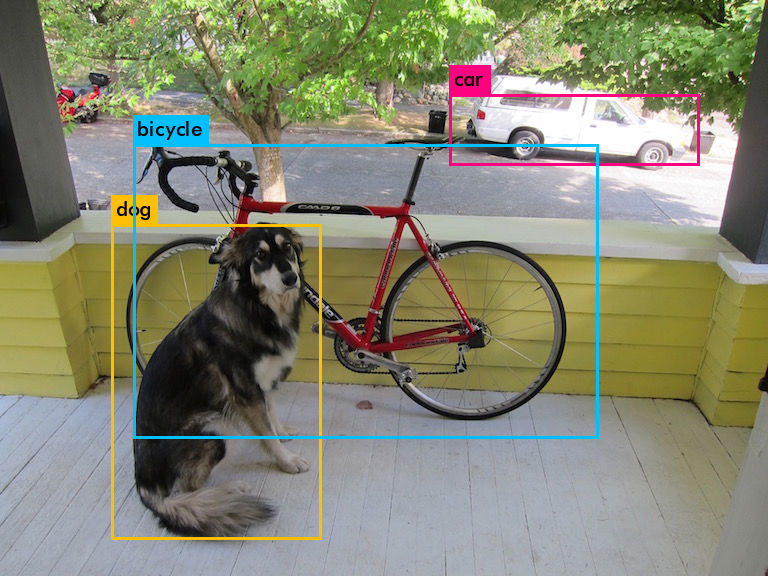
7$ ./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_10000.weights data/dog.jpg
...
data/dog.jpg: Predicted in 0.181329 seconds.
dog: 94%
car: 80%
bicycle: 92%
...
预测结果令人满意!可以看到它的置信度给出的是dog: 94%, car: 80%, bicycle: 92%
之后为了让计算机休息一下,我杀掉了训练进程。
不过没关系,在休息了一段时间之后,因为yolov3-voc.backup的存在,我在断点处重启了训练:1
$ ./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc.backup
又过了一天
…1
2
3
4ls -tr backup/
yolov3-voc_100.weights yolov3-voc_400.weights yolov3-voc_700.weights yolov3-voc_10000.weights
yolov3-voc_200.weights yolov3-voc_500.weights yolov3-voc_800.weights yolov3-voc_20000.weights
yolov3-voc_300.weights yolov3-voc_600.weights yolov3-voc_900.weights yolov3-voc.backup
有了yolov3-voc_20000.weights,我想已经够了,于是主动停止了训练。
我们最后来试试效果1
2
3
4
5
6
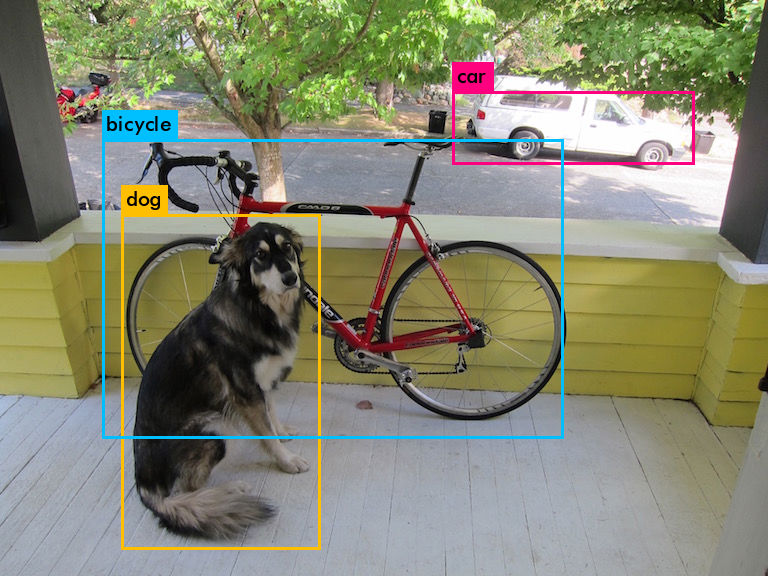
7$ ./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_20000.weights data/dog.jpg
...
data/dog.jpg: Predicted in 0.181969 seconds.
dog: 91%
car: 89%
bicycle: 100%
...
从置信度上看,提高显著!
以上。