YOLOv2论文在此
事实上,根据论文来看,作者根据不同的改进提出的是两个模型
1)提高YOLO的精度同时保持速度,这是YOLOv2
2)提出了一种分类和检测的联合训练策略,使得模型更强大,可以检测多达9000个类别,这是YOLO9000
我们先来看YOLOv2对于YOLOv1的改进:
YOLOv2改进点
1)Batch Normalization
Batch Normalization是一个通用的提高模型泛化能力的方法,并非YOLOv2首创。翻译过来称作“批量标准化”。
要理解这个方法,首先我们要理解机器学习/深度学习的一个前提:我们之所以可以用训练数据训练出一个模型,然后用该模型对测试数据进行预测,是因为我们假设了训练数据和测试数据的分布是一致的。
换句话说,我们训练出一个好的网络,如果它有比较好的泛化能力,说明这个网络除了具有强大推理能力,还具有“保持通过它的数据分布不变”的能力。所以说一个网络被训练好,自然而然会具备这种能力,因为那些权重,偏置等参数被调整成了相应的样子。
不过,这样的话,那些权重,偏置等参数因为既要负责推理还要负责保持分布,渐渐地它们需要努力很久才能调整好。这就是我们所说的收敛速度变慢。
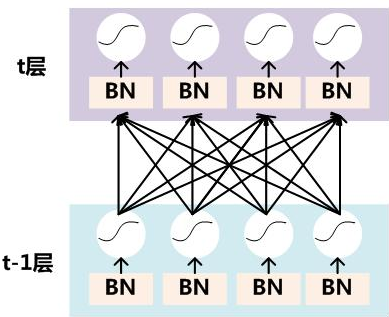
为了不让调整过程变慢,我们可以主动一点,明确一点:在网络的每一层后面(比如在CNN每个layer后面)加上专门用来保持数据分布不变的layer,这样原先那些权重,偏置参数们只需要专心训练推理能力就好了。老layer和新layer各司其职,收敛迅速,皆大欢喜。
我们主动加的layer就是Batch Normalization。
数学上理解
上面是定性描述,那么如何在数学上理解呢?
先看均值为0方差为1的正态分布: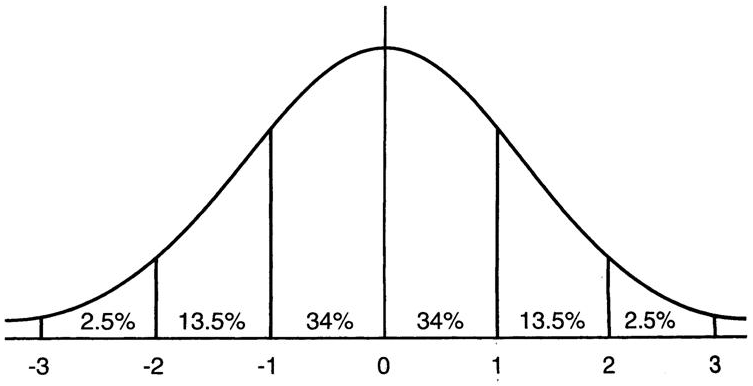
图中可看出任何一个符合该分布的数据,它有65%的概率取值在[-1,1],95%在[-2,2]
再来看Sigmoid激活函数: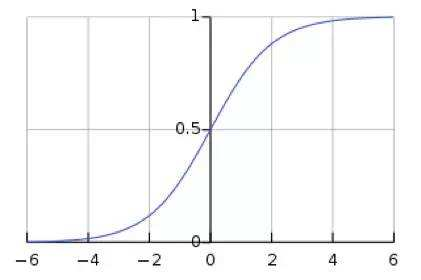
可以看到函数的梯度在[-2,2]之外渐渐平缓,到[-4,4]之外,梯度近乎消失。
我们当然不希望数据在经过Sigmoid激活之后,梯度消失,导致训练的收敛速度变慢甚至停滞。我们希望数据经过Sigmoid激活之后还能保持不错的梯度,这样梯度下降能更快速。办法很明显:确保数据在经过Sigmoid之前,满足均值为0方差为1的正态分布。如下图所示
Tradeoff
上面的做法可能会引起异议:如果使用Sigmoid的[-4,4]段,甚至[-2,2]段,就相当于在用一个线性函数,而没有用到非线性部分。那激活函数还有什么意义呢?一个充满线性layer的深度网络等于没有深度,因为多个线性layer叠加等于一个线性layer。
于是我们需要对收敛速度和非线性能力做一个tradeoff(事实上这是各类算法经常遇到的,比如速度和精度的tradeoff)。方法是:把数据变换成标准正态分布之后再加一个线性偏移:y=scale*x+shift,这样变成不太规则的正态分布,再通往激活函数。这样既能避免收敛太慢,也能使用到激活函数的非线性部分。
另外说明一下,上面新加的两个参数scale和shift的值在每个神经元上不一定相同,且也是通过训练在进行调整的。
2)High Resolution
我们知道,YOLOv1(以及大多数目前检测算法)为了获得强大的分类能力,在ImageNet数据集上进行了预训练,而ImageNet上的图片尺寸是224*224,所以预训练出来的模型是针对224*224分辨率的,而接下来进行Fine-tune时,使用的图片尺寸是448*448,如下图: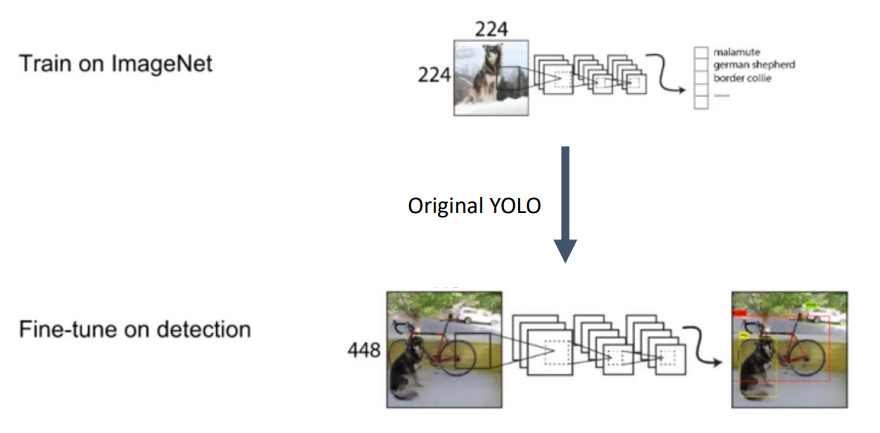
这样会导致Fine-tune的过程边长,因为它需要去适应新的高分辨率。
YOLOv2的解决办法如下图: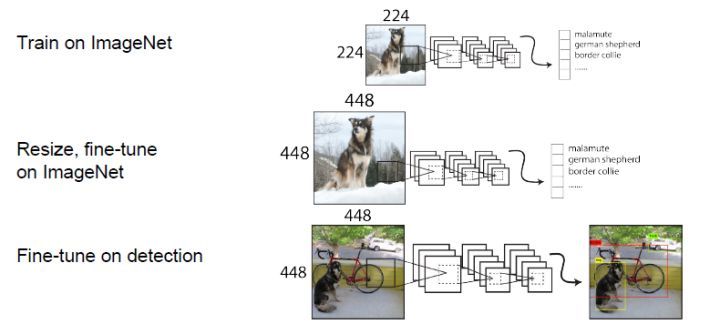
简单说就是在ImageNet数据集(224*224)上预训练Darknet-19网络之后,将ImageNet的数据resize为448*448,再次训练Darknet-19网络,然后才进行Fine-tune(在Darknet-19后面接上属于YOLOv2的检测layers),并使用448*448的检测数据集进行训练。这样就不会有分辨率适应的问题了。
3)Anchor Boxes
YOLOv1中经过一些列卷积layer之后,最后通过全连接层进行预测。然后reshape为7*7*30的特征图只是方便进行预测结果向量和原图位置的mapping. 总之7*7*30数据中的“30”由5,5,20三段构成。第一段的5表示第一个box的4个位置信息以及1个有无物体置信度,第二段的5表示第一个box的4个位置信息以及1个有无物体置信度,第三段的20表示两个box共享的20种预测类别打分。
YOLOv2去掉了信息损失多的全连接层和reshape,在特征图还是13*13的时候,借鉴Faster RCNN里的RPN,即对每一个3*3的窗口选取多个(比如9个)Anchor Box,对每个Anchor Box单独进行分类和位置预测。如果是9个Anchor Box,则最后得到的数据的shape是13*13*225,其中“225”由25,25,…,25九段构成,每一段就是每个Anchor Box的4个位置+1个置信度+20个分类打分。
前两个Box的比较见下图: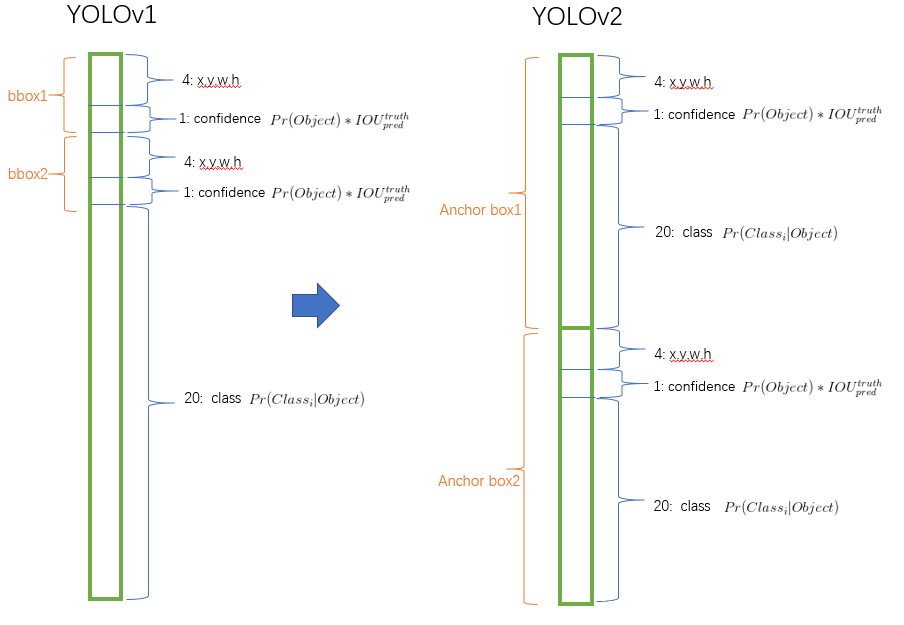
解释一下为什么特征图为13*13:首先YOLOv1中使用448*448输入,YOLOv2中将其变为了416*416然后卷积通过步长为32的卷积运算之后变成了13*13。 这么做是因为奇数维度使得特征图只有一个中心。对于一些大物体,中心点往往落入图片中心,此时使用特征图的一个中心点去预测这些物体的边界框相对容易些。
总之显而易见,YOLOv2因为网格划分更多,且每个网格如果加入了9个Anchor Box,则总数增加为13*13*9=1521个Boxes,而YOLOv1中仅为7*7*2=98个Boxes。尽管如此YOLOv2这一改动提高了精度。这是精度换速度的tradeoff。
3.1) Dimension Clusters
在Anchor Box上面,YOLOv2没有简单借鉴Faster RCNN,而是进行了改进。
因为Faster RCNN里使用的Anchor Box的高宽是手动设置的先验框,所以不一定能够很好地符合Ground Truth(即IOU够高),训练速度会更慢。为了使得一开始的Anchor Box与Ground Truth的IOU够高,作者想到事先(在正式进行YOLOv2检测网络进行训练之前)对训练集里的所有Ground Truth进行了聚类。
聚类方法使用的是K-means,距离指标就是box与聚类中心box之间的IOU值:
d(box,centroid) = 1-IOU(box,centroid)
经过作者在COCO和VOC数据集上的实验,最终选取5个聚类中心作为先验框。
3.2) Direct location prediction
在Anchor Box上借鉴RPN,但框位置的预测算法没有借鉴它。为什么?先看看RPN是怎么进行框位置的预测的——
首先要明白,RPN预测的框位置信息是相对Anchor box的位置偏移,该偏移表示为
又已知Anchor box的宽和高表示为, Anchor box的中心坐标为
,则预测框的中心
为:
首先我们看或者
取值的轻微变化可以导致结果的较大变化,比如:
当时,预测框会向右偏移一个Anchor box的宽度
当时,预测框会向左偏移一个Anchor box的宽度。
然后发现上面的公式没有任何约束,也就是说或者
随意取值,会导致预测框落在图片任何一个位置。这样会导致模型训练的收敛速度变慢。
考虑到上面描述的RPN预测框位置的弊端,YOLOv2决定在预测框位置这一项上不沿用RPN,而保留YOLOv1的做法:预测框的中心点相对于当前网格左上角(注意是相对于网格,而非相对于Anchor box)的偏移。偏移表示为。为了将边界框中心点约束在当前网格中,使用sigmoid处理偏移值,这样预测的偏移值在(0,1)范围内(每个网格的宽或高分别标准化为1),用
表示sigmoid,则现在偏移表示为
不过YOLOv2对框的宽度和高度的预测还是相对Anchor box的比率,而并非相对网格。预测框的宽和高相对Anchor box的比率为,使用指数约束之后,则为
设网格左上角坐标为,Anchor box的宽和高为
,则可以得到预测框的中心坐标
以及宽高长度
分别为:
为了更好地理解上面的解释,可以再看看下图(图中蓝色框为预测框,虚线框为Anchor box):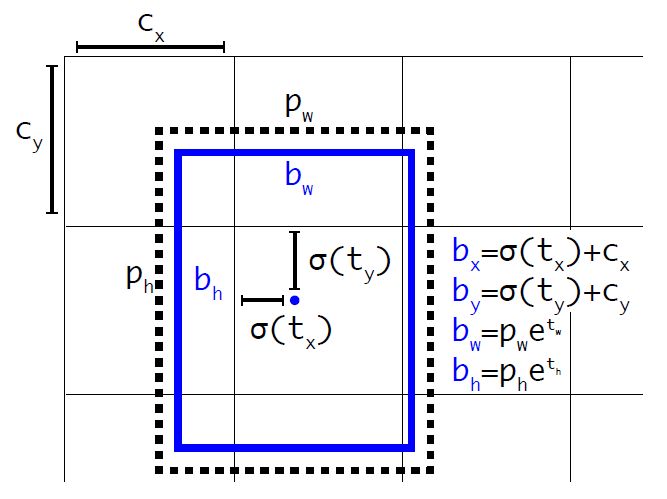
进一步,我们知道当前的特征图大小为 (作者模型中是(13,13)),那么我们可以将上面的位置信息表示为相对于整张图片的位置:
这样,我们之后要获取一个预测框的最终的位置数据,只要用上面的值乘上图片的尺寸就好了。
4) New Network: Darknet-19
YOLOv2使用了一个新的基础模型Darknet-19(YOLOv1用的是VGG16),它的结构从上到下如下: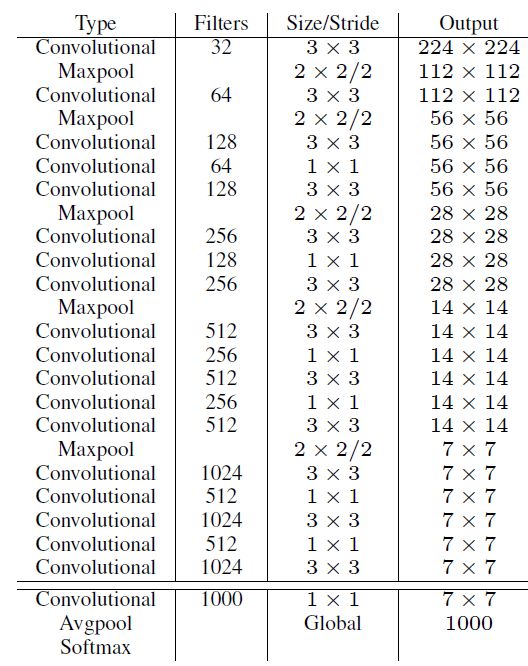
它主要采用了3*3的卷积和2*2的maxpooling。我们知道2*2的maxpooling之后,特征图的维度会减少一半,但是这里设置了2倍的输出通道数,所以持平了。还可以看到每两个3*3的卷积中间还会夹一个1*1的卷积。
1*1卷积核的卷积有什么用呢?
首先可以去手写数字识别一文里回顾一下多通道卷积的实施流程。把那张图再贴过来: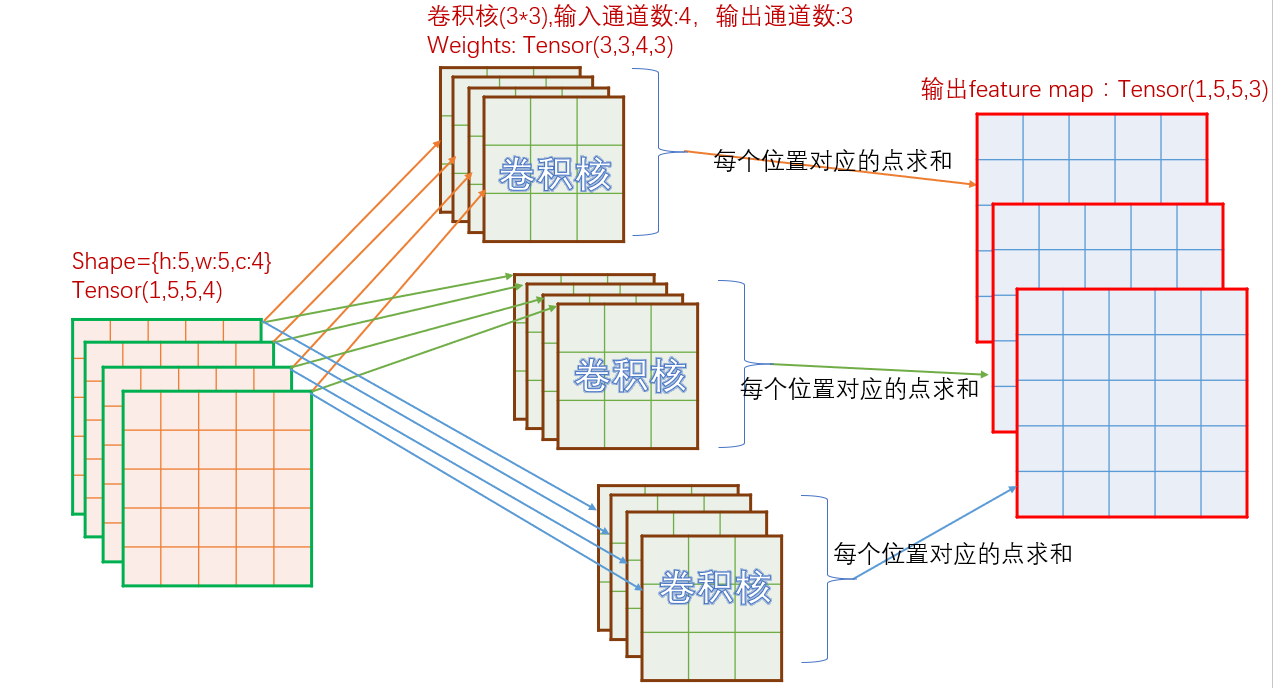
上图有两个知识点值得注意:
- 上图中的“求和”意味着实现了原数据多个通道的整合
- 如果你输入一个4个通道的数据,想要通过卷积输出3个通道,那么就要使用12个通道的卷积核。
举一反三,32通道的6*6矩阵,用32通道的1*1卷积核做卷积,得到的就是1通道的6x6的矩阵,如下图: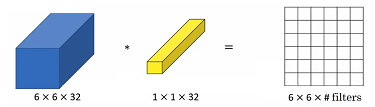
再举一反三,192通道的28*28矩阵,连续被32个192通道的1*1卷积核做卷积,就得到32通道的28*28的矩阵。其实就是所谓的信道压缩或者信道降维。如下图: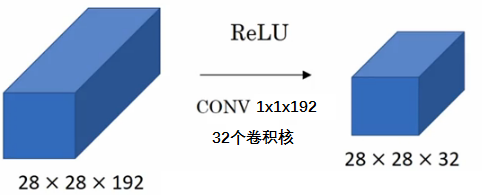
插一句,很多时候我们不会将通道单独拎出来说,而是放入数据shape中表达。比如上面的例子就可以表达为:28*28*192矩阵,连续被32个1*1*192卷积核做卷积,得到28*28*32的矩阵。
所以1*1卷积核的卷积的作用是:
1)跨通道的特征整合
2)特征通道的升维和降维
3)减少卷积核参数(简化模型)
好了,回到Darknet-19。每两个3*3的卷积中间还会夹一个1*1的卷积,为了就是上述的3个优化点。
最后值得一提的是,Darknet-19每个卷积层后面同样使用了Batch Normalization层以加快收敛速度。
从效果上说,Darknet-19之后,YOLOv2的mAP值没有显著提升,但是计算量却可以减少约33%,这是YOLOv2作者的实验结论。
5) Fine-Grained Features
YOLOv2最后输出的特征图是13*13,对于预测大物体来说是足够的,但是对于小物体来了说这个分辨率太低了,所以YOLOv2在这里像SSD一样进行了多多尺度的检测。
不过检测方法和SSD不一样。YOLOv2提出了一种称作passthrough的layer来进行多尺度处理。从26*26的特征图(也就说最后一个maxpooling之前)开始,拉出一个平行分支(原来Darknet-19网络没有被改变),进行passthrough, 举个4*4进行passthrough的例子,如下: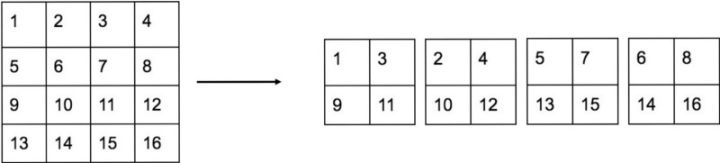
passthrough也就是从原特征图中抽取元素,输出尺寸为1/2倍,通道数为4倍的特征图。注意,不是多个新特征图,只是通道数变成了4倍。也就是说,上图中4*4*1特征图经过passthrough之后变成了2*2*4特征图,而非4个2*2*1特征图。
对于YOLOv2来说就是26*26*512通过passthrough之后,变成了13*13*2048 (尺寸为1/2,通道数为4倍)。
到这里passthrough分支就结束,接下来将它(13*13*2048的特征)与回到主网络Darknet-19(主网络经过最后一个maxpooling已经得到了13*13*1024)汇合,于是输出最终的13*13*3072特征图。在这个特征图上,进行预测操作。
6) Multi-Scale Training
在进行完多尺度检测之后,作者又开始在输入图片上打起了多尺度的主意。值得一提的是,这个方法是YOLOv2的创新,而不像之前讲的那些改进都是借鉴别的算法。该方法就是,在训练过程中,每迭代一定的次数,随机换一种尺寸(出于计算需要,尺寸都是32的倍数)的图片输入进行训练,当然这时候最后进行预测的layer也需要改,以适应这个新的尺寸。如下图所示: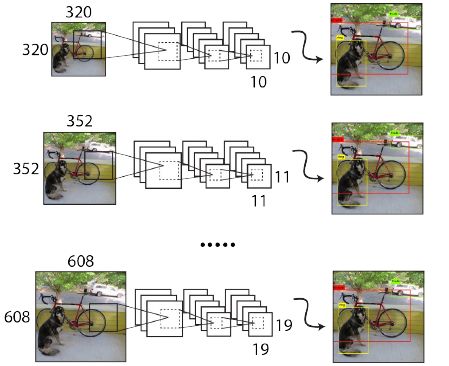
使用了该方法之后,YOLOv2可以适应不同大小的图片,并且预测出很好的结果。
YOLO9000
YOLO9000实际上是YOLOv2的一种继续优化方法,它之所以被单独拎出来,甚至还专门命名为YOLO9000,是因为它开创性地提出了两种不同数据集联合训练方法。
ImageNet分类数据集,数据量巨大,因为图片分类是容易进行标注的;COCO,VOC等物体检测数据集,数据量较少,因为图片中物体检测的标注更复杂。YOLOv2用COCO的数据集,学习物体的边界框,置信度和框内物体分类。虽然在边界框和置信度上,没有可以加强的地方,但是在框内物体分类这一项,可以联合ImageNet分类数据集的大量数据进行分类能力的大大加强(可以识别多达9000个类别的物体)。
联合训练的最大问题是检测数据集(如COCO数据集)只有粗尺度的标记信息,如猫、狗,而分类数据集(如ImageNet)标记信息则更细尺度,如狗这一类就包括哈士奇、金毛等。所以我们需要一种一致性的方法来融合标记信息。
为此作者提出了一种名为WordTree的层级分类方法,主要思路是根据各个类别之间的从属关系(根据WordNet)建立一种树结构,如下图: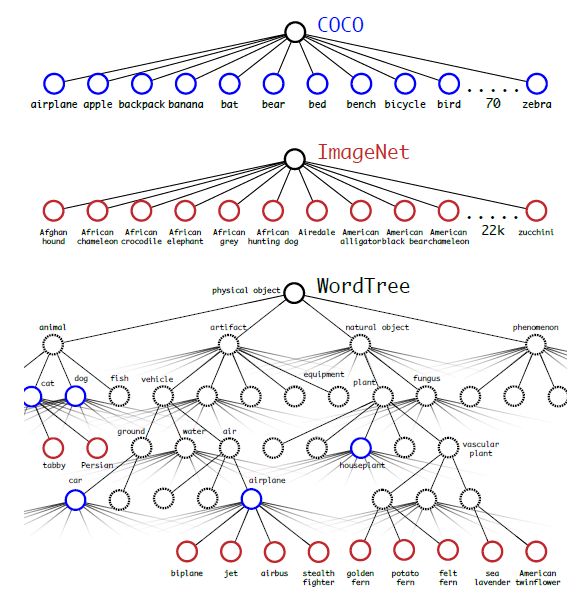
WordTree中的根节点为”physical object”,其实就是YOLOv2给出的“框内有物体”的置信度。每个节点分出的子节点(如图中的blplane,jet,airbus,stealth fighter)都属于同一子类,可以对它们进行softmax处理,以得到每一个具体分类的概率。当然上面经过softmax得到的概率只是局部概率,要计算一个分类的最终预测概率,需要将从根节点到该分类的路径上的各个局部概率相乘。如计算jet的最终预测概率,需要将physical object,artifact,vehicle,air,airplane,jet这6个节点的局部概率相乘。
这个结构在训练上的思路是:在训练过程中,当网络遇到一个检测数据集的图片与标记信息,那么就把这些数据用完整的损失函数反向传播;当网络遇到一个分类数据集的图片和分类标记信息,只用整个结构中分类部分的损失函数反向传播。
在预测上,当然跟所有软分类器一样,计算所有路径的概率乘积,选取最大概率的那个结果,就是最终的预测结果了。
以上。
参考
https://zhuanlan.zhihu.com/p/35325884
https://www.cnblogs.com/guoyaohua/p/8724433.html
http://lanbing510.info/2017/09/04/YOLOV2.html