HMM的定义
HMM即Hidden Markov Model,隐马尔可夫模型,是用来描述这样一种过程:有两类数据,一类是可以观测到的,为观测序列,一类是观测不到的,为隐藏状态序列,简称状态序列。比如知道一个人过去三天的活动序列是“逛街->运动->在家”,而想知道过去三天的天气序列是“晴->多云->雨”还是“多云->晴->雨”还是其它。这种情况我们可以构建HMM:将这个人的活动看做观测序列,天气看做隐藏状态序列,进而求各种状态序列的概率。当然也可以反过来知道状态序列,求这个人的某种活动序列的概率。 再比如在语音识别中就利用了HMM,认为语音为观测序列,它背后的文字为状态序列。
在数学上表示HMM为:
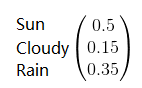
初始状态矩阵:
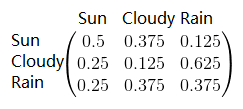
状态转移矩阵:
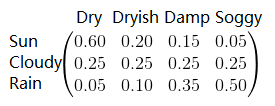
观测矩阵(或混淆矩阵):
HMM的例子
通过一个例子解释它们的含义:
一个包含三个状态的天气系统(晴天、多云、雨天)中,可以观察到4个等级的海藻湿润情况(干、稍干、潮湿、湿润)。
初始化的的时候,晴,多云,雨出现的概率分别为0.5,0.15,0.35,则初始状态矩阵为:
对于隐状态序列:上个状态为晴天的情况下,转移到当前状态也为晴天的概率为0.5,转移到多云的概率为0.375,转移到雨的概率为0.125(加起来为1);上个状态为多云的情况下,转移到当期为晴天的概率为0.25,转移到多云的概率为0.125,转移到雨的概率为0.625….所以状态转移矩阵为:
对于观测序列:若当前状态为晴,观测到海藻为干的概率是0.60,观测到海藻为稍干的概率是0.20 …;若当前状态为多云,观测到海藻为干的概率是0.25,观测到海藻为稍干的概率是0.25 ….所以观测矩阵为:
HMM的三个问题
HMM被使用来解决三个方面的问题:
1)评估观测序列。给定观测序列和多个确定的模型(),求这个观测序列在每个模型出现的概率,以判断现在使用的是什么模型。比如上面的天气-海藻湿度问题,我们可能有春季模型,夏季模型,秋季模型,冬季模型。分别计算不同模型下当前观测序列出现的概率,选概率最大的,就能知道现在是什么季节。这里面会用到前向算法或者后向算法
2)解码。给定观测序列和模型(),求最可能出现的状态序列,比如语音识别,文本分词。会用到维特比算法
3)学习。给定观测序列和模型的参数估计值(而非实际值),求模型的实际值。会用前向-后向算法,也称作Baum-Welch算法
我们分别讲这三个问题的解决方法。
评估观测序列(一):前向算法
依然考虑上面的天气-海藻的例子。
现在我们观测到连续三天的海藻状态是:dry-damp-soggy
问在当前的模型下,出现这种观测序列的概率是多少?
如果是暴力计算的话,我们可以穷举条路径的概率,然后把它们的概率相加,得到我们要的结果,比如其中的一条路径的概率计算如下:
sunny(dry)->cloudy(damp)->rainy(soggy): P[sunny(dry)->cloudy(damp)->rainy(soggy)]=[P(sunny)P(dry|sunny)]*[P(sunny->cloudy)P(damp|cloudy)]*[P(cloudy->rainy)P(soggy|rainy)]
代入数值计算:
我们可以建立一个递归模型,来替代暴力计算。
假设一个序列从1开始到T时刻结束:
输入:HMM模型,观测序列
输出:观测序列概率
1) 计算时刻1的各个隐藏状态前向概率:
为初始隐状态的概率,i为隐状态的序号,
来自混沌矩阵,为第i个隐状态条件下观测到o的概率
2) 递推时刻2,3,…T时刻的前向概率:
来自混沌矩阵,为t+1时刻第i个隐状态下观测到的
的概率;
来自隐状态转移矩阵,为第j个隐状态到第i个隐状态的转换概率
3) 计算最终结果:
意思是最终结果的输出为最后一个时刻T的局部概率值和。
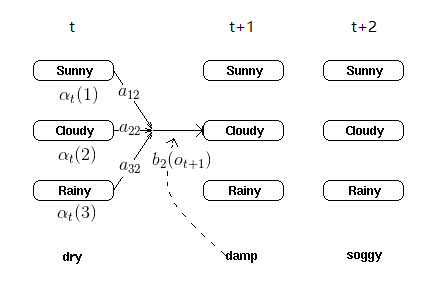
以上步骤就是前向算法。为了便于理解递归关系,选取t+1时刻对cloudy状态计算局部概率的图:
在实际应用中,我们用不同的模型(如春、夏、秋、冬模型)来算出不同的最终结果概率,比较哪个最大(最大似然思想),则是我们要求的季节。
评估观测序列(二):后向算法
有了前向算法的基础,理解后向算法只要把状态序列的走向逆向就可以:
输入:HMM模型,观测序列
输出:观测序列概率
1) 初始化时刻T的各个隐藏状态后向概率:
全部初始化为1
2) 递推时刻T−1,T−2,…1时刻的后向概率:
3) 计算最终结果:
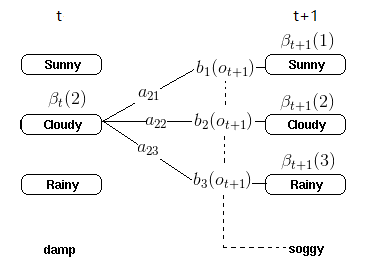
图示理解:
解码:维特比算法
考虑这样一个问题:给出观测序列和模型,找出最可能的隐状态序列。
如果是暴力计算的话,我们可以穷举条可以导致改观测序列的隐状态序列路径,找出哪条路径能最大概率地导致该观测序列,也就是我们要找的路径。
比如其中的一条路径的概率计算如下:
sunny(dry)->cloudy(damp)->rainy(soggy): P[sunny(dry)->cloudy(damp)->rainy(soggy)]=[P(sunny)P(dry|sunny)]*[P(sunny->cloudy)P(damp|cloudy)]*[P(cloudy->rainy)P(soggy|rainy)]
代入数值计算:
可以发现单独计算一条路径跟评估观测序列里面的做法是一样的。不一样的在后面我们需要比较各条路径,而评估观测序列是需要把各条路径概率相加。
不用暴力计算,用维特比算法,流程如下:
输入:HMM模型,观测序列
输出:最有可能的隐藏状态序列
1)当t=1时,初始化局部状态:
其中i表示第i个隐状态,为第i个隐状态的初始概率,
表示第i个隐状态下观测到
的概率;
为目前为止的最大概率路径
2) 进行动态规划递推时刻t=2,3,…T时刻的局部状态:
其中表示t时刻的能观测结果的隐状态序列组合的最大概率;
表示到t-1时间为止的最大概率的路径的概率;
表示第i个隐状态下观测到
的概率;
为目前为止的最大概率路径
3) 计算时刻T最大的δT(i),即为最可能隐藏状态序列出现的概率。计算时刻T最大的Ψt(i),即为时刻T最可能的隐藏状态。
4) 利用局部状态Ψ(i)开始回溯。对于t=T−1,T−2,…,1:
这表示,我们需要往后走一步,才能得到当前这个隐状态序号。最终得到最有可能的隐藏状态序列:
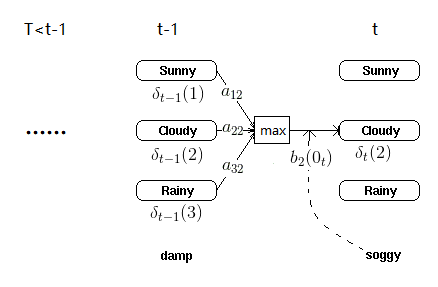
通过图示理解上面的迭代过程:
学习:Baum-Welch算法
学习的目标是求解未知的HMM的参数。
已知D个时刻为T的观测序列和对应的隐藏状态序列,即是已知的,此时我们可以用最大似然来求解模型参数。也就是说
在
的状态下被观测到,是因为“
本身的初始状态”乘以“
情况下
被观测到的概率”的结果,是最大的。 也就是说
比其它组合都大,最好的结果就是乘子的每一部分都是各自领域最大的:
1) 大于
和
等其它初始状态概率
2)大于
和
,…, 等其它观测概率
同理,在非初始情况下,在
的状态下被观测到,根据“乘子的每一部分都在各自领域最大”的推断,是因为从上一个隐状态
转移到这一个
的概率最大,同时观测到
的概率最大也就是:
3)在状态转移矩阵A的一行里面,比其它值
,
, …等都大
4)在观测矩阵B的一行里面,比其它
,
,…等都大
以上,根据1)2)可以求初始矩阵,根据3)4)可以求状态转移矩阵A和观测矩阵B,当然可能不止一个解。
上面的例子很美好,是因为它同时告诉了我们隐状态的序列和观测序列。如果只告诉我们观测序列,而隐状态序列未知,怎么求HMM模型的参数呢?
首先,我们可以想到我们面临的状况很类似于EM算法的背景。在EM算法里面,我们在只知道试验结果而不知道隐含条件的情况下,能够通过反复猜想-估计得出目标概率。没错接下来要用的Baum-Welch算法实际上是基于EM算法,不过它提出的时间比EM算法早。Baum-Welch算法像EM算法一样,没有参数值,就猜出一个参数值,代入进去计算,不断反复,直至收敛到一个理想参数。
中间公式的推导就不给出了,直接给出Baum-Welch(鲍姆-韦尔奇)算法的流程。
输入: D个观测序列样本
输出:HMM模型参数
1)随机初始化所有的
2)对于每个样本,用前向后向算法计算
3)更新模型参数:
4) 如果的值已经收敛,则算法结束,否则回到第2)步继续迭代。
以上。
参考
http://www.52nlp.cn/category/hidden-markov-model
https://www.cnblogs.com/pinard/p/6955871.html